Παρουσιάσεις, προσομοιώσεις και καινοτομίες για την έξυπνη Γεωργία, καθόλη τη διάρκεια της Έκθεσης.
Περίπτερο 11 / stand 1
Τα τελευταία χρόνια, η τεχνητή νοημοσύνη (AI) διεισδύει ολοένα και περισσότερο στη γεωργική βιομηχανία ανοίγοντας νέους δρόμους στις καλλιεργητικές δεξιότητες, ενώ παράλληλα, η ρομποτική (robotics) αναλαμβάνει να διευκολύνει τις γεωργικές εργασίες.
Η ενσωμάτωση της τεχνητής νοημοσύνης (AI) και της ρομποτικής έχει μετασχηματίσει τον τομέα της γεωργίας, επιφέροντας πολλαπλά οφέλη. Τα αυτοματοποιημένα γεωργικά μηχανήματα και οι αυτόνομες ρομποτικές πλατφόρμες επιτρέπουν την ακριβή διαχείριση των πόρων, την προσαρμογή στις μεταβαλλόμενες συνθήκες και την αύξηση της παραγωγικότητας. Οι αισθητήρες και τα συστήματα παρακολούθησης παρέχουν κρίσιμες πληροφορίες για το έδαφος, τις καιρικές συνθήκες και την υγεία των φυτών. Αυτή η τεχνολογική πρόοδος ενισχύει τη βιωσιμότητα, μειώνει τις απώλειες και συμβάλλει στην ανάπτυξη μιας αποδοτικής και προσαρμοστικής γεωργίας για το μέλλον.
Στο πλαίσιο της Agrotica, το Ινστιτούτο Βιο-Οικονομίας και Αγρο-Τεχνολογίας (iBO) του Εθνικού Κέντρου Έρευνας και Τεχνολογικής Ανάπτυξης (ΕΚΕΤΑ), θα δώσει την ευκαιρία στους ενδιαφερόμενους επισκέπτες, να έρθουν σε επαφή με τις νέες τεχνολογίες στον τομέα της γεωργίας. Κατά τη διάρκεια της έκθεσης έχει προγραμματιστεί μια σειρά από ιδιαίτερα ενδιαφέρουσες παρουσιάσεις, προσομοιώσεις και καινοτομίες που αξιοποιούν σε πραγματικό χρόνο, τις πιο σύγχρονες τεχνολογίες της τεχνητής νοημοσύνης και της εξελισσόμενης ρομποτικής στον χώρο της ψηφιακής γεωργίας.
Συγκεκριμένα στον εκθεσιακό χώρο, θα γίνονται καθημερινά, οι παρακάτω παρουσιάσεις – δράσεις:
- Γεωργικές επίγειες ρομποτικές πλατφόρμες σε συνεργασία με τον άνθρωπο
- Γεωργικά drones
- ΑI
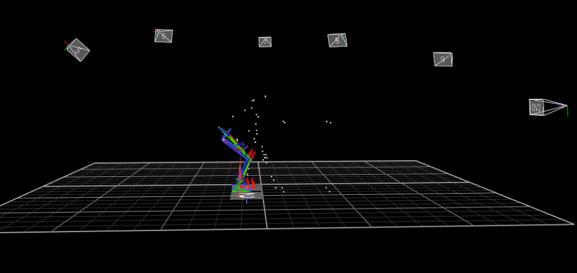
Αναγνώριση ζιζανίων από επίγεια ρομποτική πλατφόρμα (Unmanned ground vehicle UGV).
Η αυτόνομη ρομποτική πλατφόρμα έχει την δυνατότητα να πλοηγείται αυτόνομα μέσα στα γεωργικά περιβάλλοντα εκτελώντας μια προ-σχεδιασμένη πορεία, ενώ ταυτόχρονα αναγνωρίζει και αποθηκεύει την θέση των ζιζανίων με την χρήση Τεχνητής Νοημοσύνης, τόσο κατά μήκος της πορείας του όσο και ανάμεσα στην καλλιέργεια με τη χρήση υπερφασματικών και καμερών βάθους.
Παρουσίαση
Η διαδικασία αναγνώρισης των ζιζανίων στον αγρό θα προσομοιωθεί με την βοήθεια τεχνητού χλοοτάπητας.


Αναγνώριση κατάστασης εργάτη γης από UGV σε συνεργατική εργασία φόρτωσης καρπών.
Παρουσίαση
Ο εργάτης θα είναι διασυνδεδεμένος με wearables, τα οποία θα στέλνουν δεδομένα με τα οποία θα γίνεται ανάλυση κίνησης (χρήση Τεχνητής Νοημοσύνης – ΑΙ) από την αυτόνομη ρομποτική πλατφόρμα που θα υποστηρίζει την εργασία του.


Παρουσίαση
Αναγνώριση μυοσκελετικών καταπονήσεων επιπλοκών στον εργάτη.
Χειρισμός από τον εργάτη αυτόνομης ρομποτικής πλατφόρμας (UGV) με νευματικές κινήσεις.
Παρουσίαση
Εξολοκλήρου απομακρυσμένος έλεγχος με νευματικές κινήσεις της επίγειας ρομποτικής πλατφόρμας με την χρήση Τεχνητής Νοημοσύνης (AI). Επιπλέον αναγνώριση επικίνδυνης κατάστασης (πτώση εργάτη) από την συνεργατική ρομποτική πλατφόρμα.

Αναγνώριση και καταμέτρηση φυτοκόμης από drone (UAV) μέσω διασυνδεδεμένου συστήματος διαχείρισης φάρμας (FMIS).
Παρουσίαση
Θα χρησιμοποιηθεί συστοιχία δενδρυλλίων με τη βοήθεια τον οποίων θα παρουσιαστεί η δυνατότητα του συστήματος να αναγνωρίζει και να καταγράφει την εξέλιξη της ανάπτυξης των φυτών.

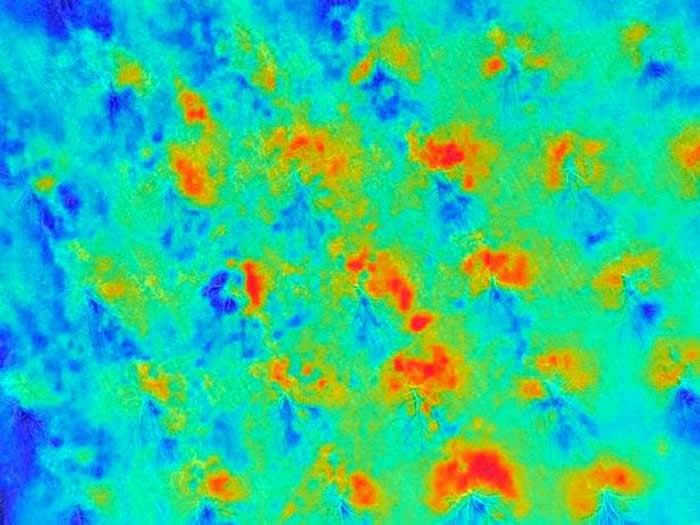
Αναγνώριση ασθενειών μέσω UGV και UAV σε αμπέλι (χρήση πολυφασματικών – υπερφασματικών καμερών) μέσω Τεχνητής Νοημοσύνης.
Προσομοίωση
Λόγω αδυναμίας εκτέλεσης σε πραγματικά φυτά κατά την εποχή του Φεβρουαρίου, θα παρουσιαστεί video με την λειτουργικότητα του συστήματος.
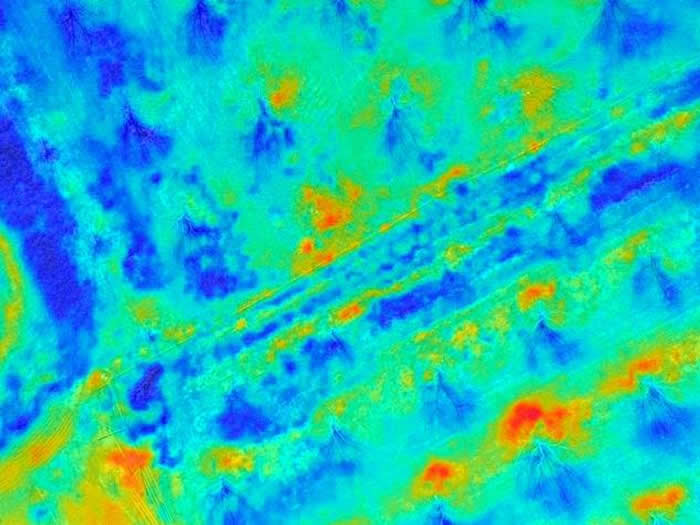
Αναγνώριση stress φυτών. Συνδυασμός μετεωρολογικού σταθμού και drone με θερμική κάμερα.
Παρουσίαση
Θα χρησιμοποιηθούν δενδρύλλια σε γλάστρα ή σε κάποιο παρακείμενο φυτό της έκθεσης, προκειμένου να παρουσιαστεί η λειτουργικότητα του συστήματος.
Αυτόνομη στάθμευση και εκκίνηση από χώρο στάθμευσης της αυτόνομης ρομποτικής πλατφόρμας, χωρίς επίβλεψη.
Παρουσίαση
Η επίγεια ρομποτική πλατφόρμα μέσω αλγόριθμων τεχνητής νοημοσύνης, θα αναγνωρίζει τους στόχους (σημεία στάθμευσης), οι οποίοι θα τοποθετηθούν στο σημείο της επίδειξης. Η ρομποτική πλατφόρμα θα πλοηγείται αυτόνομα μέχρι το σημείο στάθμευσης, ενώ όταν θα προσεγγίζει το σημείο στάθμευσης, θα ξεκινάει μια προσχεδιασμένη αλληλουχία κινήσεων που θα διασφαλίζουν την ασφαλή στάθμευσή του.
